传统车规级毫米波雷达通过接收物体反射回来的电磁波信号并输入到计算单元进行识别运算,输出数据包含测量目标物位置、类别、速度以及强度等多维信息。传统的信号处理方法很难完全过滤掉雷达原始数据中的噪声且在处理过程中会造成部分有效信息丢失,导致雷达在探测目标时出现漏检和误检的情形。
金脉基于地平线征程6E/M智驾平台和域控(集中式)雷达感知系统,以数据为驱动力,最大化有效信息的收集,搭建以神经网络算法为核心的深度学习计算模型并自主持续优化。金脉将收集的雷达ADC数据转成二维和三维频谱数据,根据频谱数据特定结构形式,结合自身多年AI研发经验,自研高效处理雷达频谱数据的感知模型,在感知模型中通过卷积神经网络从雷达频谱数据中提取出有效信息。相对于传统的基于规则的信号处理方法,金脉采用数据驱动的方式从更原始的雷达数据中提取信息,结合雷达感知模型,有效降低雷达信息提取的丢失,让雷达感知结果更加准确。同时,金脉自研雷达感知算法采用了基于共享骨干网络的多任务学习模型结构,可确保模型实时性运算的情况下同时输出目标检测、语义分割、占有预测、目标追踪等结果。
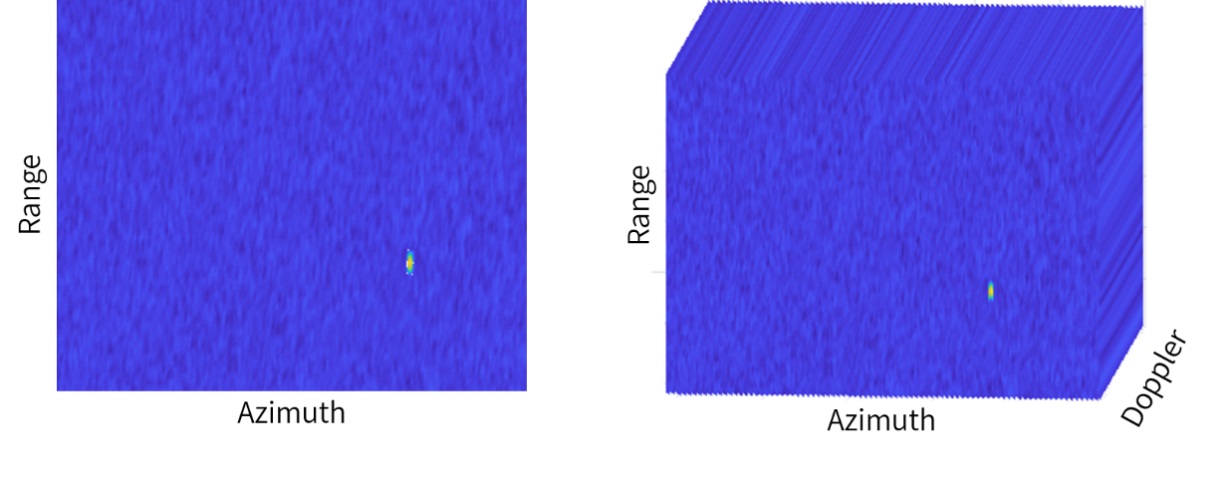
(a)雷达二维频谱数据 (b)雷达三维频谱数据
金脉域控雷达二维频谱数据和三维频谱数据
(颜色表示强度,颜色越深强度越大,黄绿色区域表示目标物区域)
金脉凭借对征程®6系列芯片的深入理解,通过优化算法架构,最大限度地释放芯片的计算潜能。传统雷达通常直接输出雷达感知结果信息,在智驾域控制器中与其他传感器如摄像头、激光雷达进行后融合感知,其结果受到各模态数据感知能力的限制。为了充分挖掘传感器原始数据信息,提升感知性能,金脉雷达算法方案利用地平线征程®6系列芯片DSP和BPU资源对毫米波雷达原始数据进行处理,将优化的FFT(傅里叶变换)、IFFT(逆傅里叶变换)等算法移植到DSP单元,将3D检测、分割、占用网格和跟踪算法部署在BPU上,在提升感知精度的同时保证了数据处理的实时性。该方案也可以支持前、中、后三种多传感器融合感知算法,可与不同路线的感知算法进行匹配集成以提供更高的感知性能。
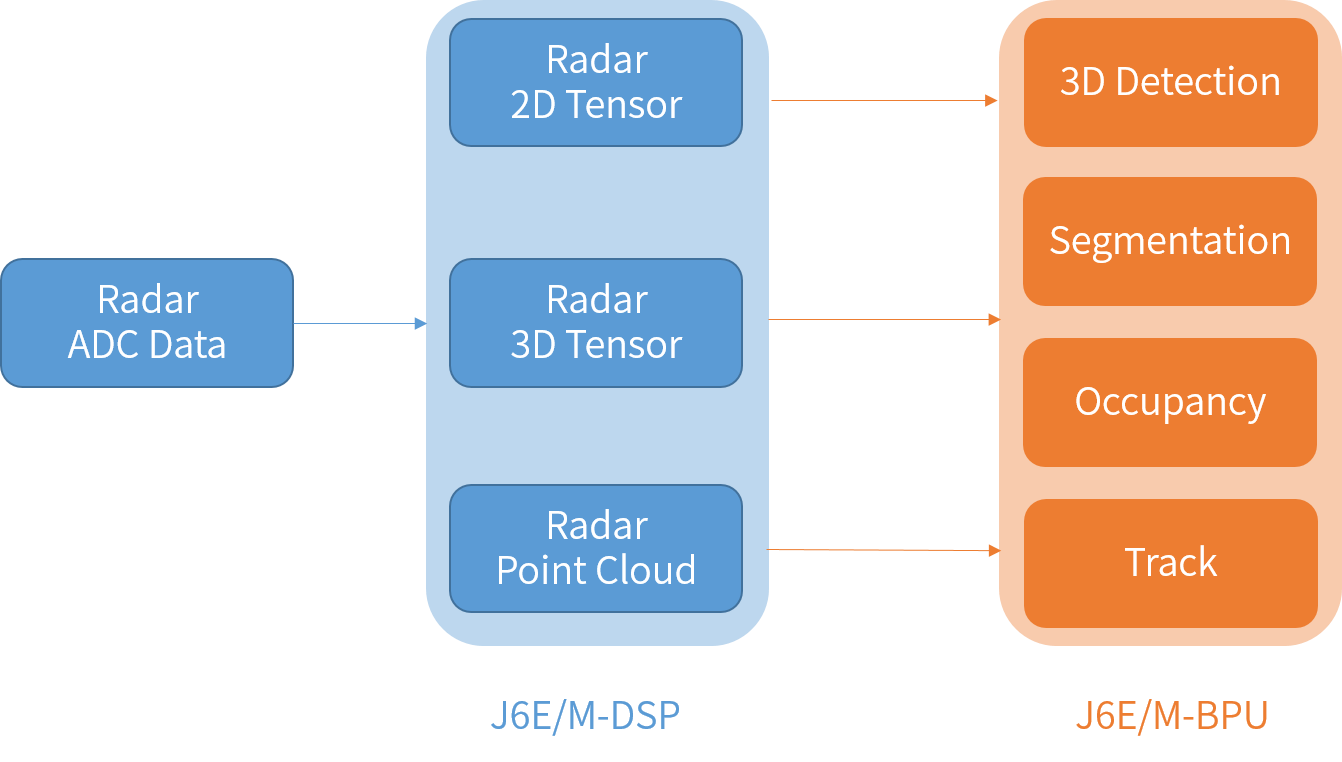
地平线征程6E/M雷达数据处理流程示意图
(DSP负责传统雷达信号处理,BPU负责深度学习感知算法处理)
金脉域控制器方案最多支持接入7颗摄像头、4颗域控角雷达和1颗前雷达,外加12颗超声波传感器。该域控方案面向高速NOA和城市NOA场景设计,支持集成和部署基于AI的毫米波雷达感知算法,在提高感知性能的前提下,系统成本可以进一步下探。在传感器接口方面,摄像头和域控毫米波雷达采用统一接口,可灵活调整,可以进一步拓展应用场景。在功能安全方面,该方案集成了系统安全监测机制,可实时监测各部分的运行状态,快速定位和修复故障,从而提高车辆运行的安全性。
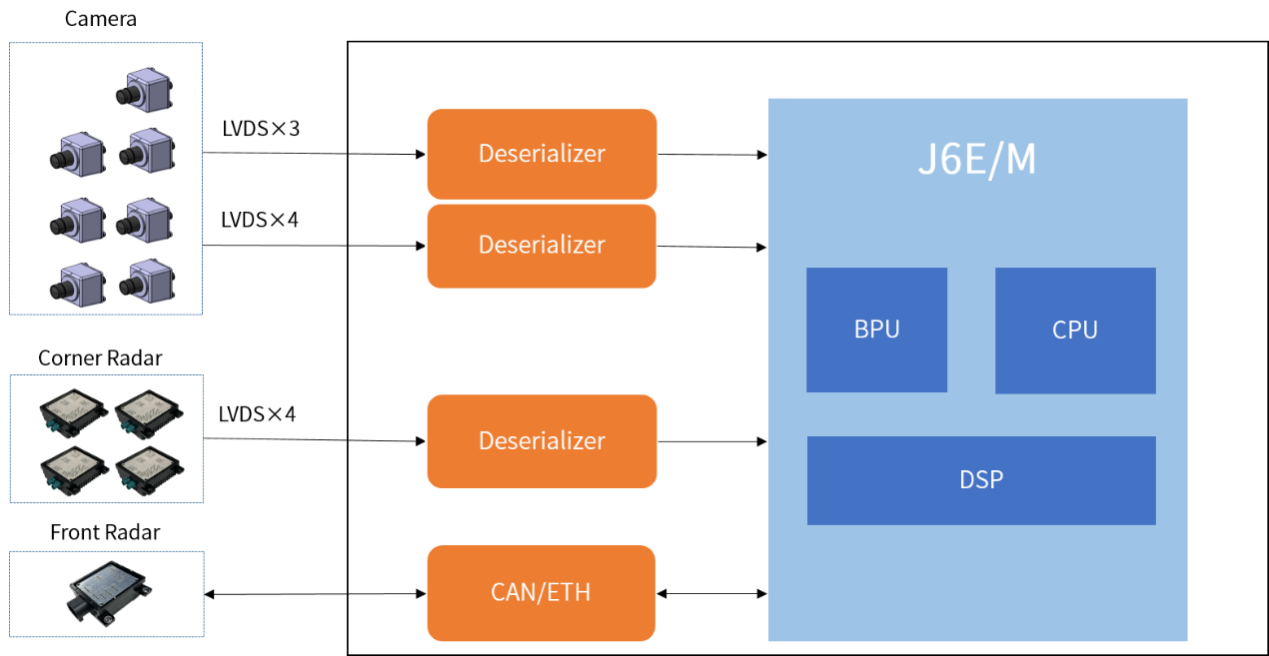
金脉域控制器方案示意图
随着汽车电子电气架构从分布式进阶到域架构,再到中央计算架构演变,整车算力上移已是大势所趋。雷达作为智能汽车感知系统的核心也在这场演变中向着超级传感器进化,并衍生出域控毫米波雷达。它将计算单元转移到域控上,借助域控制器的丰沛算力,为多传感器数据融合提供更大的灵活性,使雷达更加轻量与灵敏的同时,显著降低雷达系统硬件成本。金脉域控雷达算法解决方案将大幅提高感知系统运行效率,实现高稳健、高精度的4D目标检测结果,助力高效、智能、安全的智驾体验。


